
VDA 5050: SYNAOS Expertenstimmen | Kundenreferenz Volkswagen Nutzfahrzeuge
VDA 5050
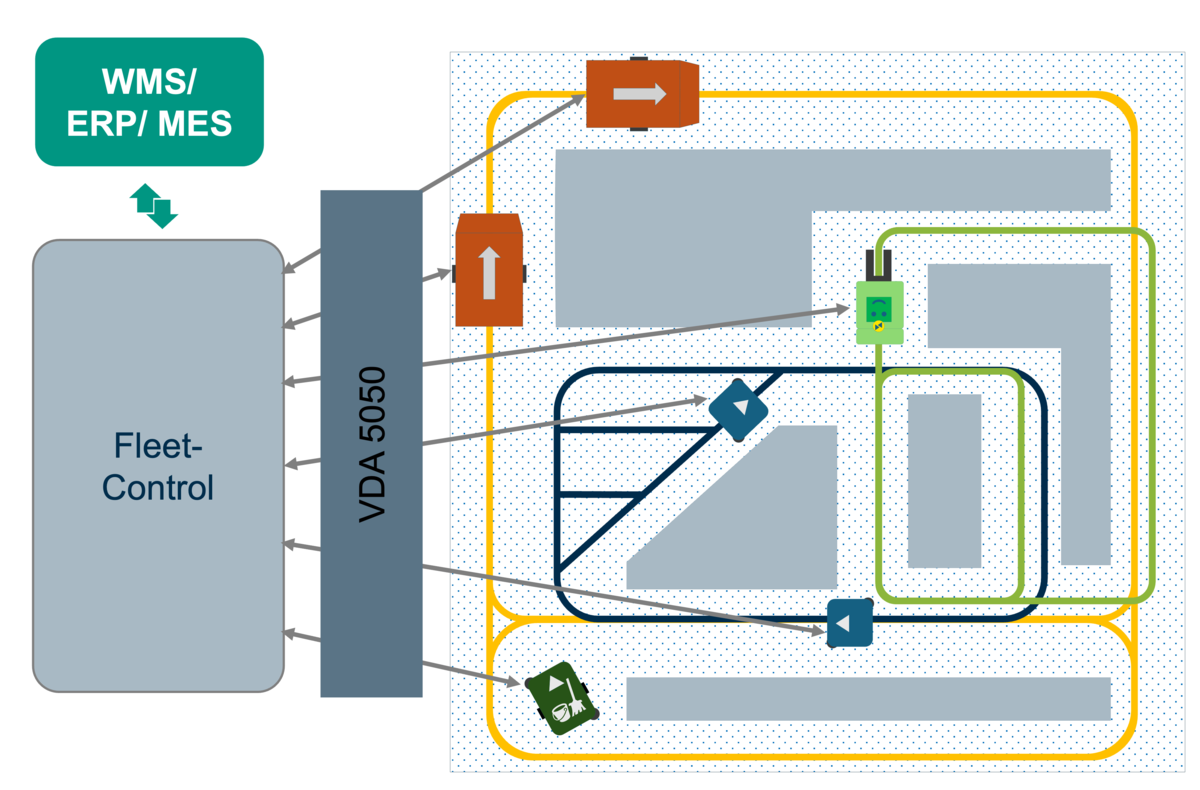
Interface for the vendor-independent communication between Mobile Robots and a Fleet Control

IFL
What is the VDA 5050?
-
The VDA 5050 provides a communication interface between any mobile robot and a fleet controller
-
It eases the onbaording effort for the integration of new mobile robots into existing systems
-
It standardized the content of order sent to the mobile robots as well as the feedback sent to the fleet control
-
Proprietary capabilities of mobile robots and fleet control systems can still be used
-
Here you will find a comprehensive video providing specific insights into how the VDA 5050 works and its application scenario: VDA 5050 in Logistics Operations
-
IFL leads the technical development of VDA 5050 since its start. If you have any questions, you can contact us here: vda5050∂ifl.kit.edu
-
Further details and explanations can be found here: VDMA - How does VDA 5050 work in detail?

How to contribute?

Technical Deep Dive

Version 3.0.0

Current release
Who develops the VDA 5050?
Where can I find the VDA 5050?
The current official release of the VDA 5050 can be found here: Current release
Old versions of the VDA 5050 can be found here
The Open Source development can be found here: VDA 5050 - GitHub
Is the VDA 5050 only for AGVs?
No! The VDA 5050 is a toolbox that can be used for all types of mobile robots. With version 3.0, the focus of development was placed on free-navigating mobile robots. More technical details can be found here: Technical Deep Dive
Does the VDA 5050 limit the capabilities of my mobile robots?
Why do the various players rely on the VDA 5050?
- Users rely on the VDA 5050 because it avoids a vendor lock-in. New robots with different capabilities can be more easily integrated into existing systems.
- Mobile robot manufacturers rely on the VDA 5050 to increase the potential customer base and to sell their system with other manufacturers. By converting their control systems to VDA 5050, vehicles with capabilities that the manufacturer cannot currently supply can be integrated and still maintain performance.
- Fleet control providers that offer manufacturer-independent fleet control rely on VDA 5050 to simplify the onboarding of new vehicles and offer customers this flexibility.
The VDA 5050 is an open recommendation, what does that mean?
- The VDA 5050 is openly accessible, which means no paywall and no license fees
- It is also being developed as open source. Changes can be tracked on GitHub.
- It is community-based, the requirements come from the industry and are openly discussed in GitHub issues.
- Here are ways to get involved: How to contribute?
Is the VDA 5050 a safety standard?
Do you have any questions or suggestions?
Here we explain how you can actively participate in the development of VDA 5050: How to contribute?
Book your training!
Do you or your company require information about the VDA 5050?
What we offer:
- General introduction to the VDA 5050
- Technical deep dives into any specific topic regarding the VDA 5050
- Personalized training sessions to meet the needs of your or your company's needs
- Training is available in either German or English
Every type of training is available for any business level!
Contact us directly and tell us what type of training you or your company requires: vda5050∂ifl.kit.edu
Success stories
Experiences and reports of sucessful implementations and benefits from using the VDA 5050
SDM4FZI Forschungsprojekt: Automatische Knotenkanten-Netze via VDA5050 in Plant Simulation
SDM4FZI Forschungsprojekt: Automatische Knotenkanten-Netze via VDA5050 in Plant Simulation
One Site, Two Fleets, VDA 5050 in the Middle
Kollmorgen – Autonomous Mobile Solutions
One Site, Two Fleets, VDA 5050 in the Middle
Kollmorgen – Autonomous Mobile Solutions
VDA 5050 in teaching
Hands-on experience, teamwork, and industry relevance defined our new Industrial Mobile Robotics Lab at IFL: in just three weeks, students built a functional mobile robotics system with fleet control using VDA 5050, transitioning from simulation to real robots and demonstrating how quickly standardized orchestration can be achieved.

| Kontakt | ||
|---|---|---|
| Enke, Constantin Academic Researcher |
+49 721 608-48632 +49 171 3524440 constantin enke ∂does-not-exist.kit edu CS 50.38 1.13 |
|
| Schumacher, Pietro Research Associate |
+49 721 608-48630 pietro schumacher ∂does-not-exist.kit edu CS 50.38 |

