
BotSequencer – Entwicklung eines integrierten Hochleistungssortier- und -sequenziersystems auf Basis autonomer Roboter
- Ansprechperson:
- Projektgruppe:
- Förderung:
Programm InvestBW des Ministerium für Wirtschaft, Arbeit und Tourismus Baden-Württemberg
- Projektbeteiligte:
- Starttermin:
01.10.2021
- Endtermin:
30.09.2023
Aufgrund zunehmender Komplexität und Dynamik logistischer Prozesse in Verbindung mit stetig steigender Nachfrage nach individualisierten Produkten hat sich in den letzten Jahren die Angebotsvielfalt im Bereich neuer bzw. verbesserter automatisierter Logistiksysteme kontinuierlich weiterentwickelt. Zusätzlich müssen die Systeme immer größere Mengen an Warengüter in einem kürzeren Zeitfenster umsetzen. Neben reinen Transportsystemen ist vor allem im Bereich der Sortier- und Sequenziersysteme ein Aufschwung zu erkennen, da diese Aufgaben bisher meist mit einfachen unflexiblen Standardlösungen bewältigt werden. Die Aufgabe dieser Systeme ist es just in time die richtigen Warengüter, in der richtigen Reihenfolge, am richtigen Ort bereitzustellen. Vor allem außerhalb der Lagertechnik kommen immer häufiger fahrerlose Transportsysteme (FTS) zum Einsatz, da sie mehr Flexibilität und geringere Kosten ermöglichen im Vergleich zu stationären Anlagen aus Stetigfördertechnik.
Das Gesamtziel des Forschungsprojekts BotSequencer ist es, ein Sortier- bzw. Sequenziersystem zu entwickeln, das durch den Einsatz autonomer Roboter einen Hochleistungsdurchsatz ermöglicht und dabei alle essentiellen Softwarefunktionen integriert zur Verfügung stellt. Sortierung bzw. Sequenzierung stellt eine steuerungstechnisch herausfordernde Aufgabe dar, da über das reine Start-Ziel-Routing Abhängigkeiten aller Routen im System berücksichtigt werden müssen. Jedoch kann vor allem eine sequenzierte Warenbelieferung von Bedarfsstationen zahlreiche logistische Anwendungen gewinnbringend unterstützen (siehe unten). Die autonomen Roboter agieren vollständig dezentral, wodurch das System flexibel erweiterbar, robust und skalierbar ist. Zusätzlich soll die Intelligenz des Systems auch auf Übergabestellen erweitert werden, um den gesamten Prozessablauf über eine High-Speed-Kommunikation zwischen Transportfahrzeugen und Übergabestellen effizienter zu gestalten. Die Prozessgeschwindigkeit aktueller Systeme wird maßgeblich dadurch eingeschränkt, dass für die prozesssichere Warenübergabe ein Anhalten der Fahrzeuge erforderlich ist. Im Rahmen des Forschungsprojekts soll eine High-Speed-Drive-By- Übergabe zwischen den Robotern und den Übergabestellen entwickelt werden, sodass eine zuverlässige Übergabe von Warengütern während des Vorbeifahrens der Roboter ermöglicht werden. Als vollständig abgeschlossenes System sieht das Gesamtkonzept außerdem die integrierte Bereitstellung von Zusatzfunktionalitäten vor, wie automatische Topologieerkennung, Selbstkonfigurierbarkeit, eigenständige Explorationsfahrten und Plug-&-Play-Fähigkeit der Softwarefunktionen.
Fahrzeuge und Übergabestelle für die High-Speed-Drive-By-Übergabe werden dabei von der Holz automation GmbH und der Abteilung Fördertechnik des IFL entwickelt. Die flexlog GmbH und die Abteilung Logistiksystem entwickeln die plug-&-play-fähige Steuerungssoftware.
Anwendungsszenarien
Durch das entwickelte BotSequencer-System können beispielsweise folgende Anwendungsszenarien gewinnbringend unterstützt werden:
Beschickung von Routenzügen:
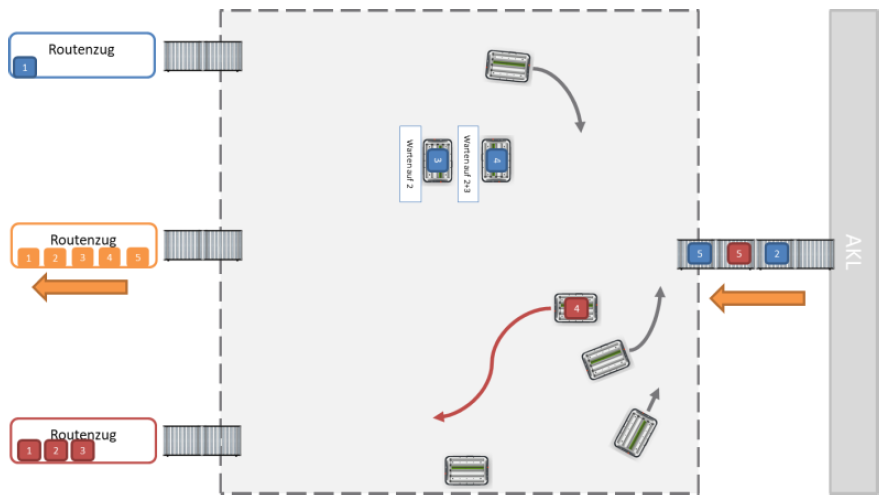
Das System wird hier beispielhaft vorgelagert zu Milk-Run-Routenzügen und nachgelagert zu einem AKL eingesetzt. Dabei fungiert das System als Sortierung (auf die einzelnen Routenzüge), sowie Sequenzierung (Einhaltung der Reihenfolge) bei Beladung der einzelnen Routenzüge. Außerdem setzt das System eine Pufferfunktion, um sodass das vorgelagerte AKL die Auslagerreihenfolge Spielzeitoptimiert durchführen kann.
Beladung von LKWs:
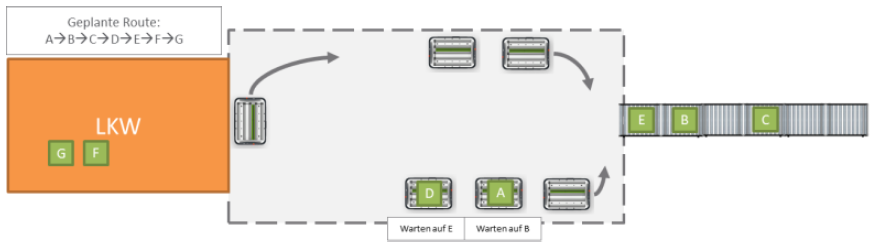
Beispielsweise im eCommerce Bereich werden LKWs zur Ausfuhr für die jeweiligen Haushalte mit Einzelpaketen beladen. Mit Hilfe des Systems können die LKWs gemäß der geplanten Ausfuhrroute sequenztreu beladen werden. Dieser Schritt erfolgt bisher vorwiegend manuell durch die jeweiligen Fahrer.
Verkettung von einzelnen Produktionsschritten:
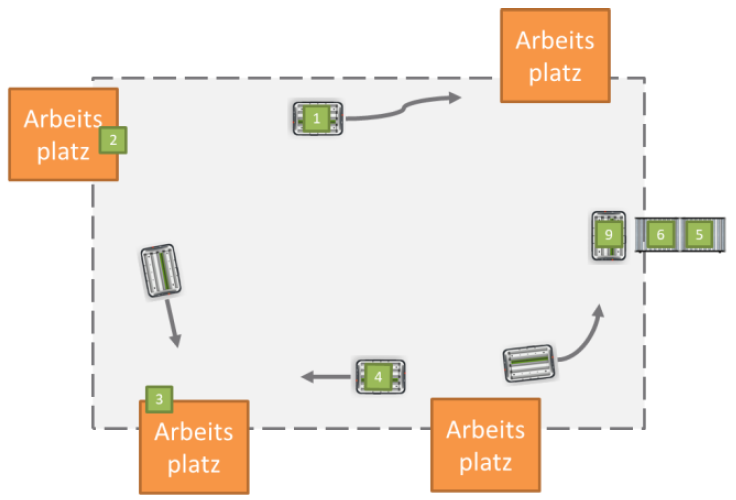
Hier kann das System flexibel die jeweiligen Arbeitsplätze abhängig der Reihenfolge (Sequenz) einzelnen Produktionsschritte miteinander verketten.