
AUTOtech.agil – Architektur und Technologien zur Orchestrierung automobiltechnischer Agilität
- Ansprechperson:
- Projektgruppe:
- Projektbeteiligte:
RWTH Aachen, TU Braunschweig, TU Darmstadt, Karlsruher Institut für Technologie, TU München, Universität Stuttgart, Universität Ulm, Universität Passau, FAU Erlangen-Nürnberg, iMAR Navigation GmbH, INCYDE GmbH, Thinking Cars GmbH, DSA Daten- und Systemtechnik GmbH, IPG Automotive GmbH, Mercedes Benz AG, Robert Bosch GmbH, Valeo Schalter und Sensoren GmbH, Vector Informatik GmbH, Vires Simulationstechnologie GmbH, Vitesco Technologies GmbH, ZF Friedrichshafen AG
- Starttermin:
10/2022
- Endtermin:
09/2025
Motivation
Die elektrische, vernetzte und automatisierte Mobilität bringt zukünftig eine umfassende Transformation des Verkehrs mit sich, verbunden mit Chancen für neue Konzepte und Verbesserungen der Sicherheit und Lebensqualität. Deutschland strebt eine nachhaltige Nutzung an, erfordert agile Ansätze und innovative Software- und Hardware-Architekturen. Innerhalb der Transformation muss die urbane Logistik neu gedacht und um die neuen Konzepte und Technologien erweitert werden.
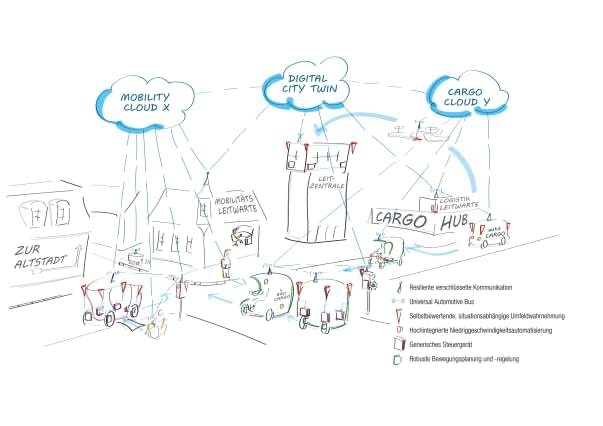
© Institute for Automotive Engineering (ika) - RWTH Aachen University / Lutz Eckstein
Ziele
AUTOtech.agil strebt danach, eine offene Architektur für zukünftige Mobilitätssysteme zu entwickeln, die in verschiedenen Fahrzeug- und Mobilitätskonzepten implementiert werden kann, indem sie auf Standardisierung von Schnittstellen und Wiederverwendung, Aktualisierbarkeit und Erweiterbarkeit funktionaler Bausteine setzt, um Nachhaltigkeit zu fördern.
Hierbei werden im Use-Case "effizienter Warentransport" entwickelte Methoden und Werkzeuge für ein koordinierendes Logistiksystem und charakteristische Fahrzeuge in einer zukünftigen Logistikkette validiert. Es werden robuste Strategien für das Design und Management von autoCARGO-Flotten und Lieferrobotern entwickelt. Basierend auf dem im UNICARagil entwickelten autonomen Lieferfahrzeug „autoCARGO“ wird eine automatisierte Materialübergabe an einen Lieferroboter demonstriert. Zur Realisierung wird eine universelle Schnittstelle zur Überprüfung der Randbedingungen und zur Positionierung entwickelt.