KomRob – Entwicklung eines autonomen Kommissionierrobotersystems
- Ansprechperson:
- Projektgruppe:
- Förderung:
Zentrales Innovationsprogramm Mittelstand (ZIM)
- Projektbeteiligte:
- Starttermin:
01.07.2015
- Endtermin:
31.01.2018
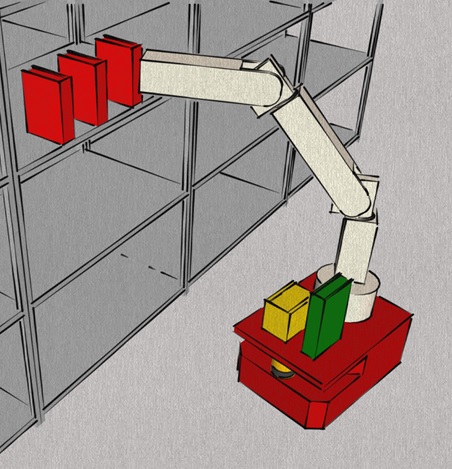
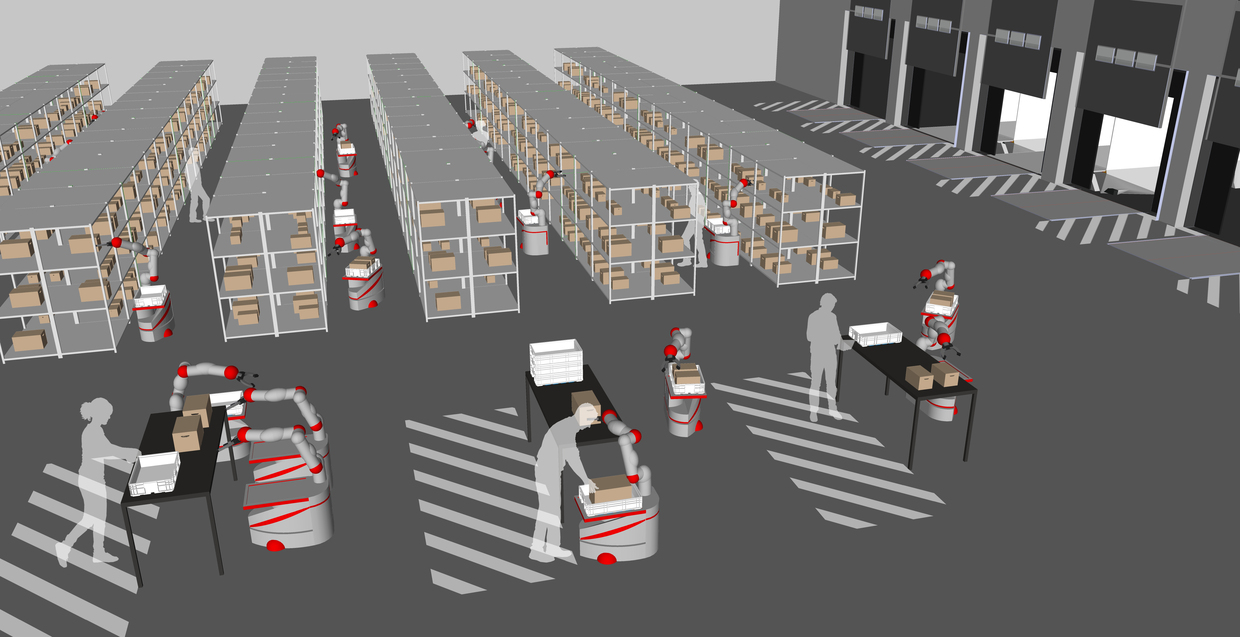
Die Kommissionierung von Waren in Fachbodenregallagern ist heute noch immer mit hohem Personalaufwand verbunden, da der Mitarbeiter jeweils den Weg zum Lagerplatz der benötigten Ware zurücklegen muss, diese einsammeln und zum Sammelplatz bringen muss. Diese Art der Kommissionierung („Person-zur-Ware-Kommissionierung“) ist bisher kaum automatisiert, da es technisch anspruchsvoll ist, verschiedenartige Objekte exakt zu erkennen und zu greifen.
Das Entwicklungsziel des Projektes KomRob besteht darin, einen mobilen Roboter zu entwickeln, welcher sich autonom in einem Fachbodenregallager bewegt, gewünschte Waren direkt aus dem Regal einsammelt und an einer Sammelstelle abliefert. Hierzu wird eine Objekterkennung sowie eine Greiferalgorithmik entwickelt, mit dem Ziel, die Zahl der nicht-greifbaren Objekte möglichst gering zu halten. Dabei wird der Ansatz eines Plug&Play-fähigen Systems verfolgt, das in bestehenden Lagern eingesetzt werden kann, ohne umfangreiche Umbauten oder Anpassungen des Lagers zu erfordern. Zudem soll der Roboter sich für hybride Einsatzszenarien eignen, also kooperativ oder parallel zur bestehenden manuellen Kommissionierung eingesetzt werden können.