
AUTOtech.agil – Architektur und Technologien zur Orchestrierung automobiltechnischer Agilität
- Contact:
- Project Group:
- Partner:
RWTH Aachen, TU Braunschweig, TU Darmstadt, Karlsruher Institut für Technologie, TU München, Universität Stuttgart, Universität Ulm, Universität Passau, FAU Erlangen-Nürnberg, iMAR Navigation GmbH, INCYDE GmbH, Thinking Cars GmbH, DSA Daten- und Systemtechnik GmbH, IPG Automotive GmbH, Mercedes Benz AG, Robert Bosch GmbH, Valeo Schalter und Sensoren GmbH, Vector Informatik GmbH, Vires Simulationstechnologie GmbH, Vitesco Technologies GmbH, ZF Friedrichshafen AG
- Startdate:
10/2022
- Enddate:
09/2025
Motivation
In the future, electric, connected and automated mobility will bring about a comprehensive transformation of transport, combined with opportunities for new concepts and improvements in safety and quality of life. Germany aims for sustainable use, requires agile approaches and innovative software and hardware architectures. Within the transformation, urban logistics must be rethought and expanded to include the new concepts and technologies.
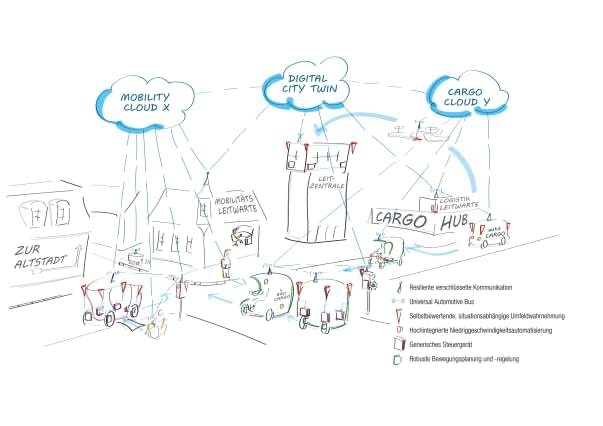
© Institute for Automotive Engineering (ika) - RWTH Aachen University / Lutz Eckstein
Goals
AUTOtech.agil strives to develop an open architecture for future mobility systems that can be implemented in different vehicle and mobility concepts by focusing on standardization of interfaces and reuse, updatability and extensibility of functional building blocks to promote sustainability.
Here, methods and tools developed in the use case "efficient transport of goods" are validated for a coordinating logistics system and characteristic vehicles in a future logistics chain. Robust strategies for the design and management of autoCARGO fleets and delivery robots are developed. Based on the autonomous delivery vehicle "autoCARGO" developed in UNICARagil, an automated material transfer to a delivery robot is demonstrated. For the realization, a universal interface for checking the boundary conditions and for positioning is developed.